







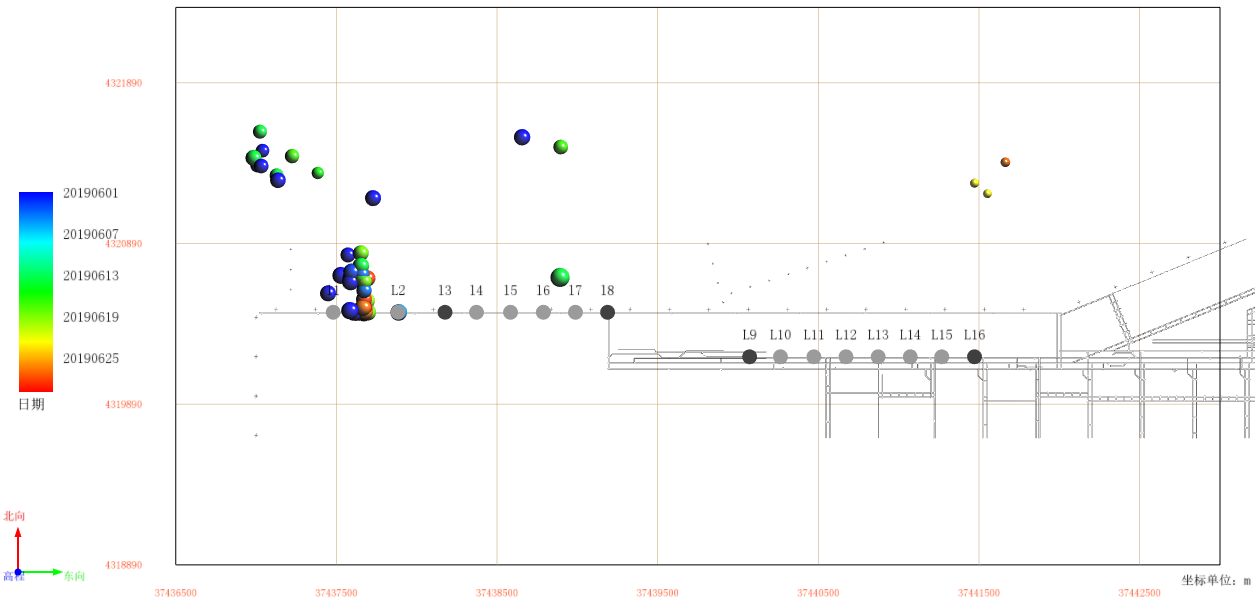
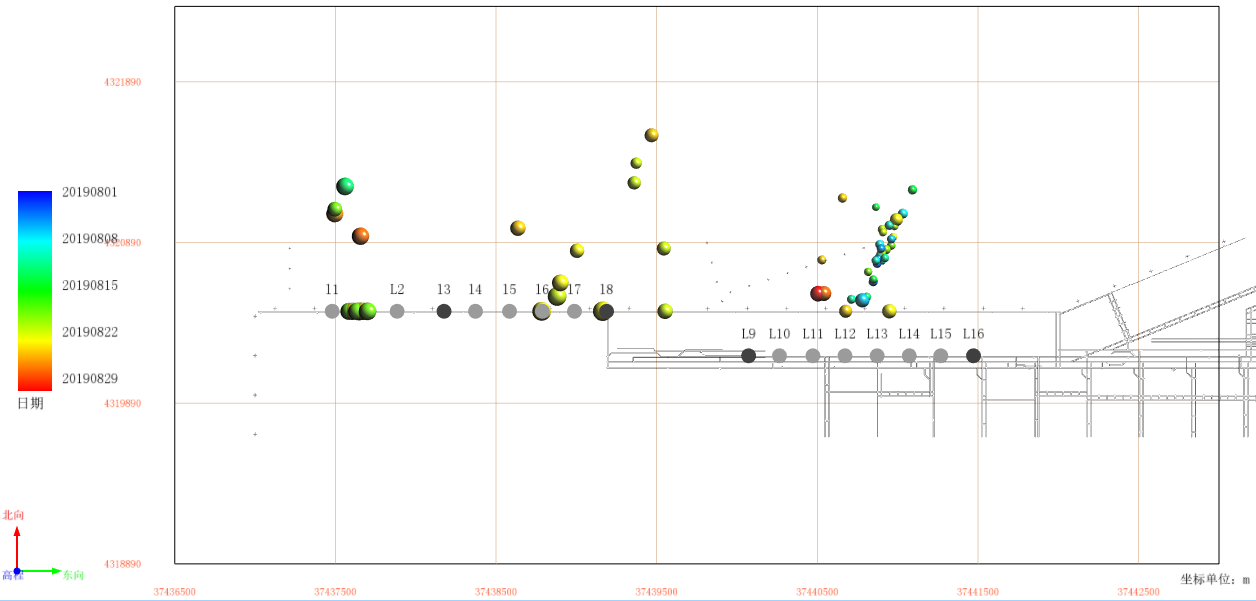

圖3-5 防越界開采活動監(jiān)測圖
產(chǎn)品
土木工程測試儀器 材料測試儀器 傳感器及數(shù)據(jù)采集器 教學與研究實驗設備 智慧數(shù)字平臺 工業(yè)檢測 環(huán)境檢測 移動式破碎機 設備診斷儀器技術與服務
技術與服務 下載中心新聞
周年慶 公司新聞 企業(yè)內(nèi)刊 市場活動 行業(yè)新聞社區(qū)
首頁 圈子 活動 課程 問答關于
公司簡介 人才招聘 聯(lián)系我們 企業(yè)郵箱集團子網(wǎng)
Earth Products India Pvt. Ltd. 香港工程質量檢測中心 歐美大地促銷商城 建筑質量檢測 歐美大地MEMS傳感系統(tǒng)
咨詢熱線(工作日9:00-18:00)
400-700-9998 技術支持:service@epc.com.hk
簡歷投遞:erphr@epc.com.hk
技術支持:service@epc.com.hk
簡歷投遞:erphr@epc.com.hk









